Donkey Sim Client
Python client that sends driving inputs from an XBox controller or a self-driving neural network model. Records video and telemetry data for training and posterity.
Overview
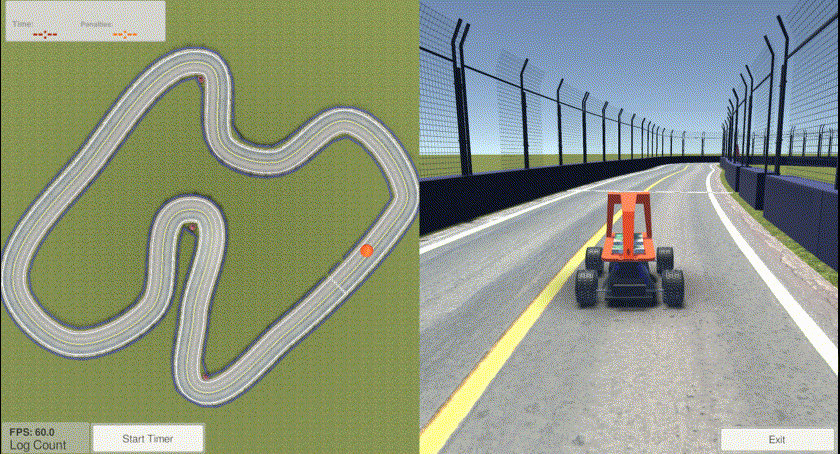
DIY Robocars hosts remote races using the Donkey (Car) Simulator . I wanted to compete, but I found that my XBox controller wasn’t playing well with the default client. Specifically, I was not able to use my analog triggers for throttle and brake.
Thus, I wrote my own client using the available API.
In doing so, I gained the ability to record telemetry data in formats other than the default Donkey Car Tub format.
Supported Data Formats
- Donkey Car Tub - format used by Donkey Car for autonomous driving training. Enables use with neat Donkey UI tools.
- CSV for my General Assembly Data Science Immersive capstone project - plugs straight into Pandas for easier data processing and modeling.
- ASL format - used in my experiments with the OpenVSLAM Visual Simultaneous Localization and Mapping framework.
Status
Living, breathing, and evolving as needed.