Robocar - TB05

Bigger, faster, and meaner than a Donkey Car, running on fully custom software. Built on a Tamiya TB-05 Pro chassis kit.
Overview
After building my 1/16 Donkey Car I became aware of the fact that the fastest racers all used 1/10th scale touring cars. Even though I had not yet mastered autonomous driving, I jumped up a scale or two to join them.
Currently the car uses a Jetson Nano for high-level (navigation, vision, autonomy) control and a Teensy 4.0 development board for low level control (sensor interface, steering servo and ESC control signals).
Manual driving is handled by my custom Bluetooth Low Energy transmitter.
Components
- Chassis: Tamiya TB-05 Pro
- Brains: Jetson Nano (4GB)
- Steering/Throttle: Teensy 4.0
- Vision: IMX219-200 camera
- Steering Servo: PohwerHD B7 Revolution PRO
- Electronic Speed Control: Hobbywing XR10 JUSTOCK ESC (G2)
- Motor: Hobbwing XERUN V10 G3R Motor - SPEC Class (13.5T)
- Voltage Regulator: Polulu 5V, 9A Step-Down Voltage Regulator
- Battery: Gens Ace 6500mAh 7.4V 50C 2S1P Hardcase Lipo Battery Pack
Status
Under active development.
Gallery
Nailed it.
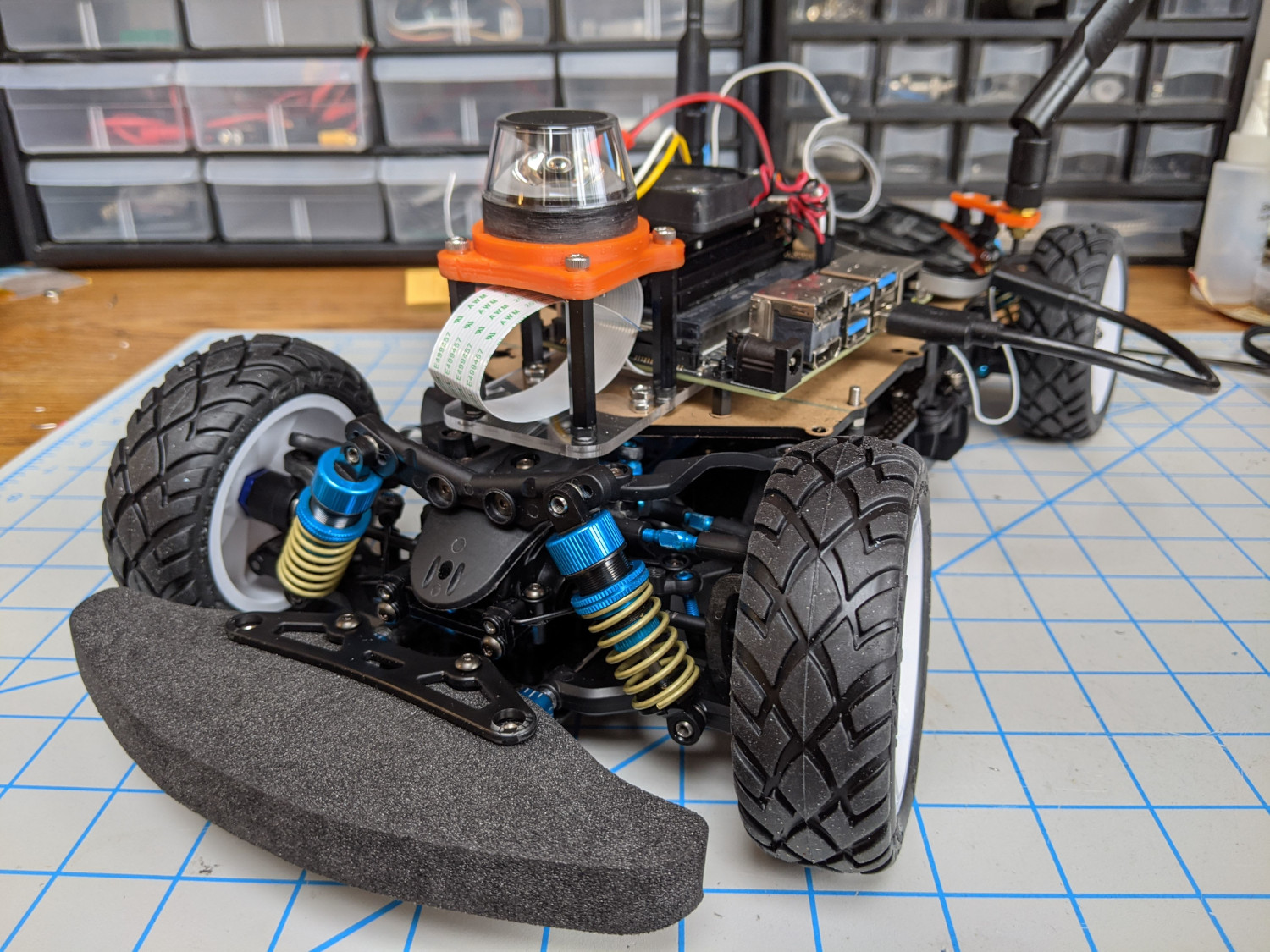
Previous iteration with RC buggy wheels and omni-directional camera lens.