Robocar TX
DIY modification of a stock 2.4 GHZ radio to function instead with Bluetooth Low Energy. Removes the need for a separate receiver module, interacting directly with Linux through the Human Interface Device (HID) protocol.
Overview
I decided to gut the stock RC transmitter that came with my crawler bot’s chassis kit replace its 2.4GHz radio module with a Nordic nRF5832.
Previously, I interfaced the RC radio with my robocar by first reading the output of the stock RC receiver with a Teensy microcontroller, then passing it via serial to my Jetson Nano. With the custom BLE method, I could skip the receiver and microcontroller by connecting directly to the Jetson and using Linux’s Human Interface Device protocol.
HID allows me to interface with the device any way I want, whether with Python or C++ or whatever, and the kernel handles all of the pairing/trusting/connecting required by Bluetooth for me.
Components
- Transmitter Module / PCB: 51C00-9082 2.4G Transmitter
- BLE Transmitter: Adafruit Feather nRF52 Bluefruit LE - nRF52832
- Transmitter Display/Input: Adafruit Mini Color TFT with Joystick FeatherWing
- Power Converter: MPM3610 5V Buck Converter Breakout - 21V In 5V Out at 1.2A
- Data Connector: USB DIY Connector Shell - Type Micro-B Plug
- Added switches/hardware: Stuff I found lying around CRASH Space
Status
Very much in progress. Currently stymied by a hardware issue: the ground wire for the throttle input potentiometer has somehow failed and needs to be re-soldered.
Software-wise, I am now working on a TFT Menu display and hammering out the details of what info needs to be sent to the robocar for full functionality.
Images

Establishing the output of the stock transmitter based on the signals sent to the stock receiver.
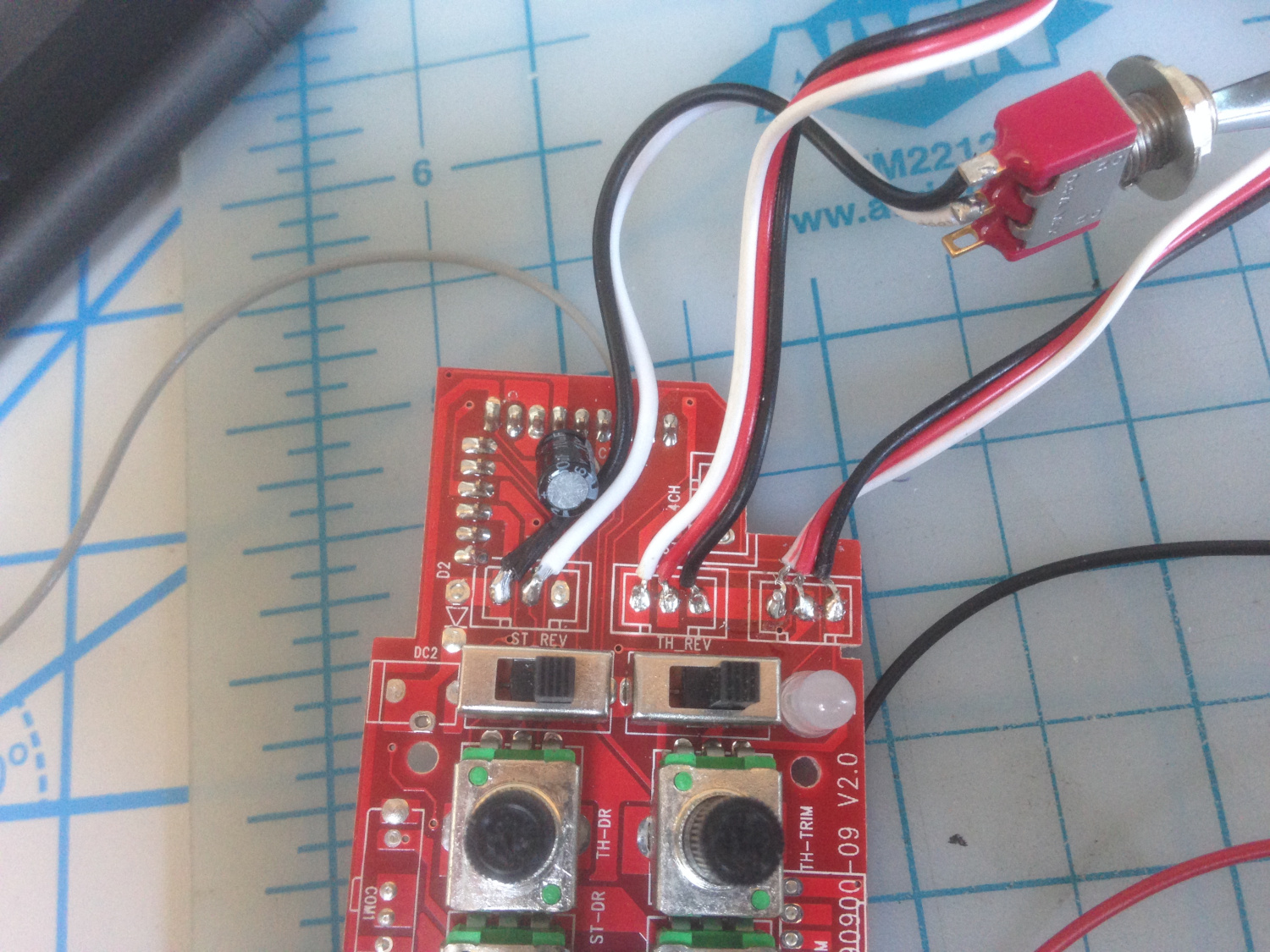
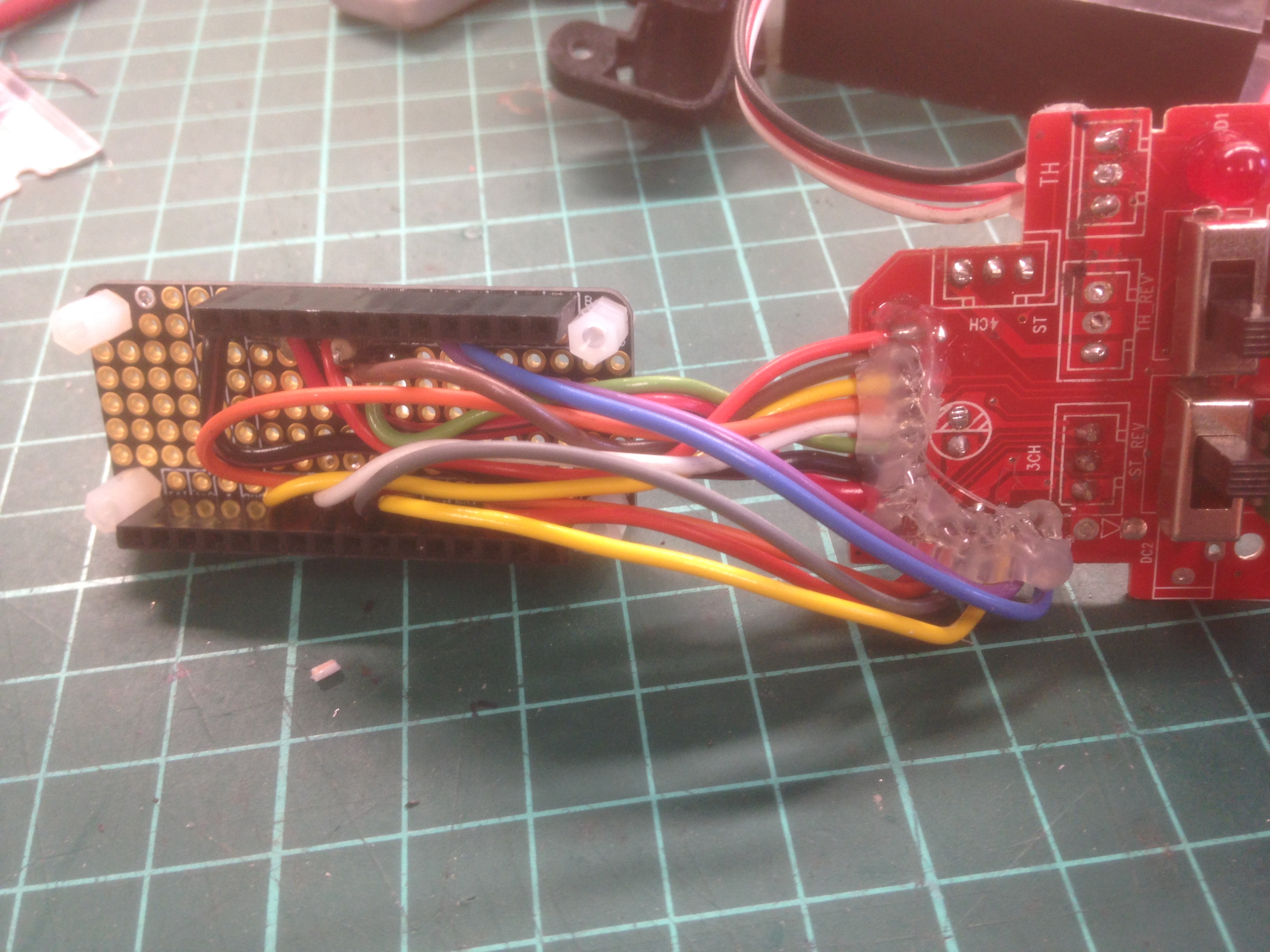
Stock controller PCB before modification.
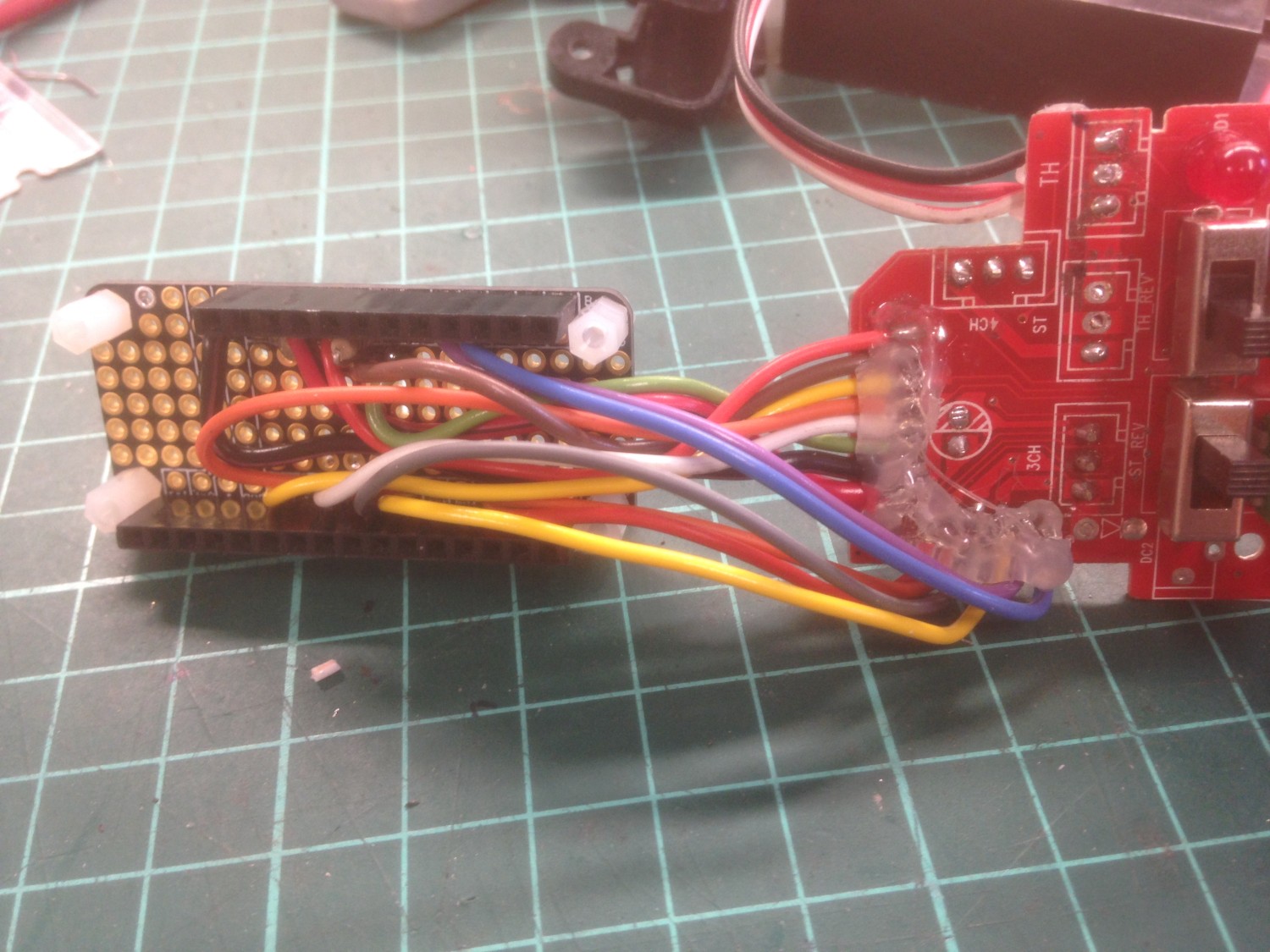
The first attempt at new wiring. Kind of a mess. Pardon the blurry image; this was taken with an ancient phone.