Crawler Bot
Projects | Links: Propeller C Repo | BLE Radio Repo
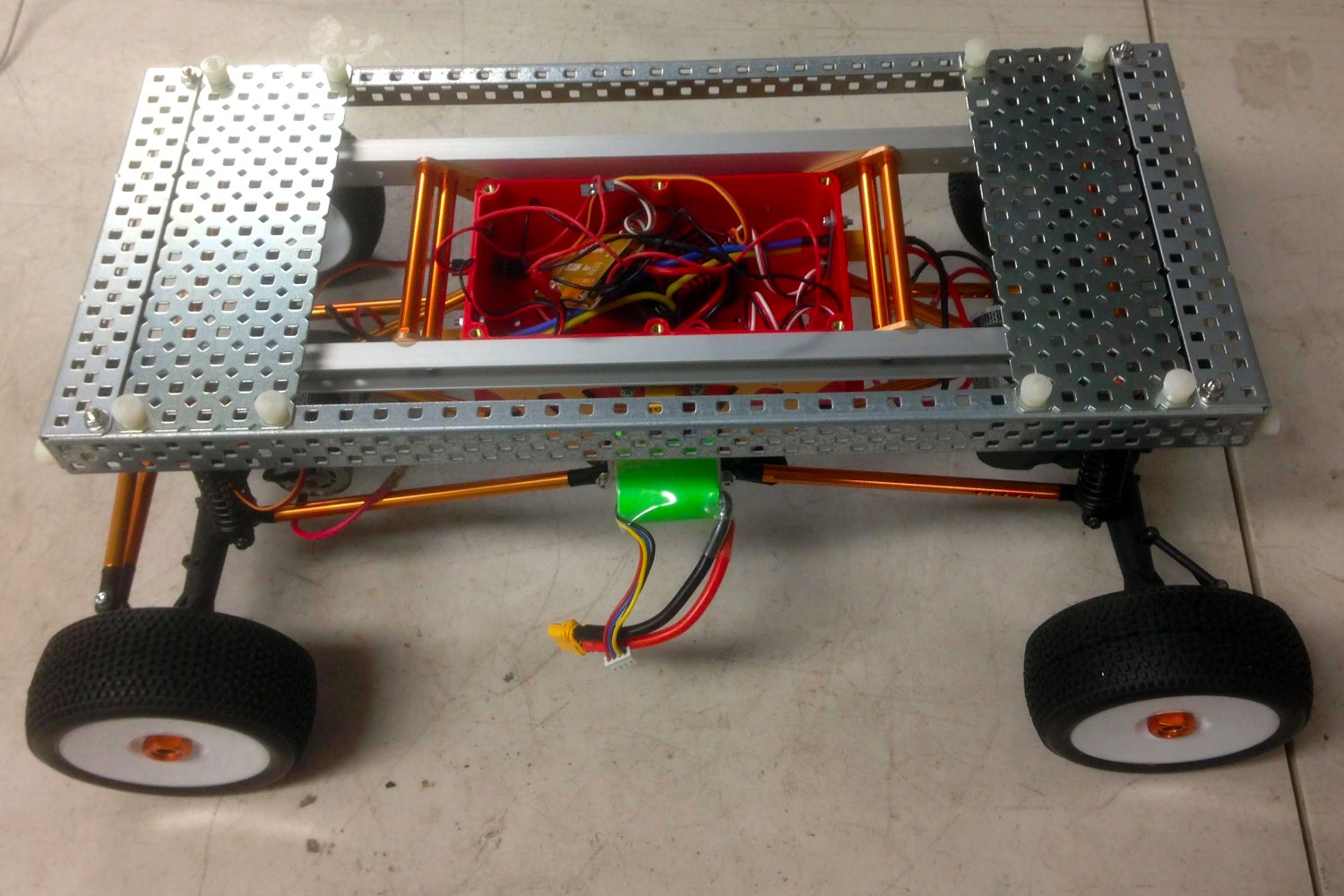
1/8 scale RC Rock Crawler controlled by an ODROID C2 and Parallax Propeller
Overview
This was conceived as a robot that could drive around on unprepared surfaces, specifically Aldrich Park at UC Irvine.
I decided I absolutely needed HARD REALTIME performance for a robot that maxes out at a brisk walking pace, so I adopted a Parallax Propeller running C.
The RoboPi robot controller provides an easy Raspberry Pi-compatible interface, servo-style connectors, power handling, voltage level shifting, and analog input.
I learned how to do some neat low-level stuff like bit banging SPI communication with an analog-digital converter chip, but I got distracted by other projects before I got everything working together.
Components
- Chassis: Exceed RC 1/8Th Mad Torque Rock Crawler
- Brains: ODRIOD-C2
- Sensors/Control: RoboPi
- ESC: QUICRUN 1060 ESC - BRUSHED x2
- Steering Servo: Solar D772 High Voltage Servo x2
- Radio: custom BLE radio project
Status
Partially complete. Drivable in manual mode.
On hold while I develop self-driving software on smaller platforms.